Find me on Google Scholar.
Papers
|
Beyond Dyadic Interactions: Assessing Trust Networks in Multi-Human-Robot Teams
Aakash Yadav, Ranjana Mehta
ACM/IEEE HRI 2024
pdf
slides
video
bib
|
|
In Gaze We Trust: Comparing Eye Tracking Self-report, and Physiological Indicators of Dynamic Trust during HRI
Yinsu Zhang, Aakash Yadav, Sarah Hopko, Ranjana Mehta
ACM/IEEE HRI 2024
pdf
slides
video
bib
|

|
All Human Versus Human-Robot Teaming: Measuring Neurophysiological Synchrony, Team Performance, and Trust during Search and Rescue
Aakash Yadav, Patralika Ghosh, Malik Rawashdeh, Diane Lee, Thomas Bolf, Ranjana K. Mehta
HFES 67th Annual Meeting
pdf
slides
bib
|

|
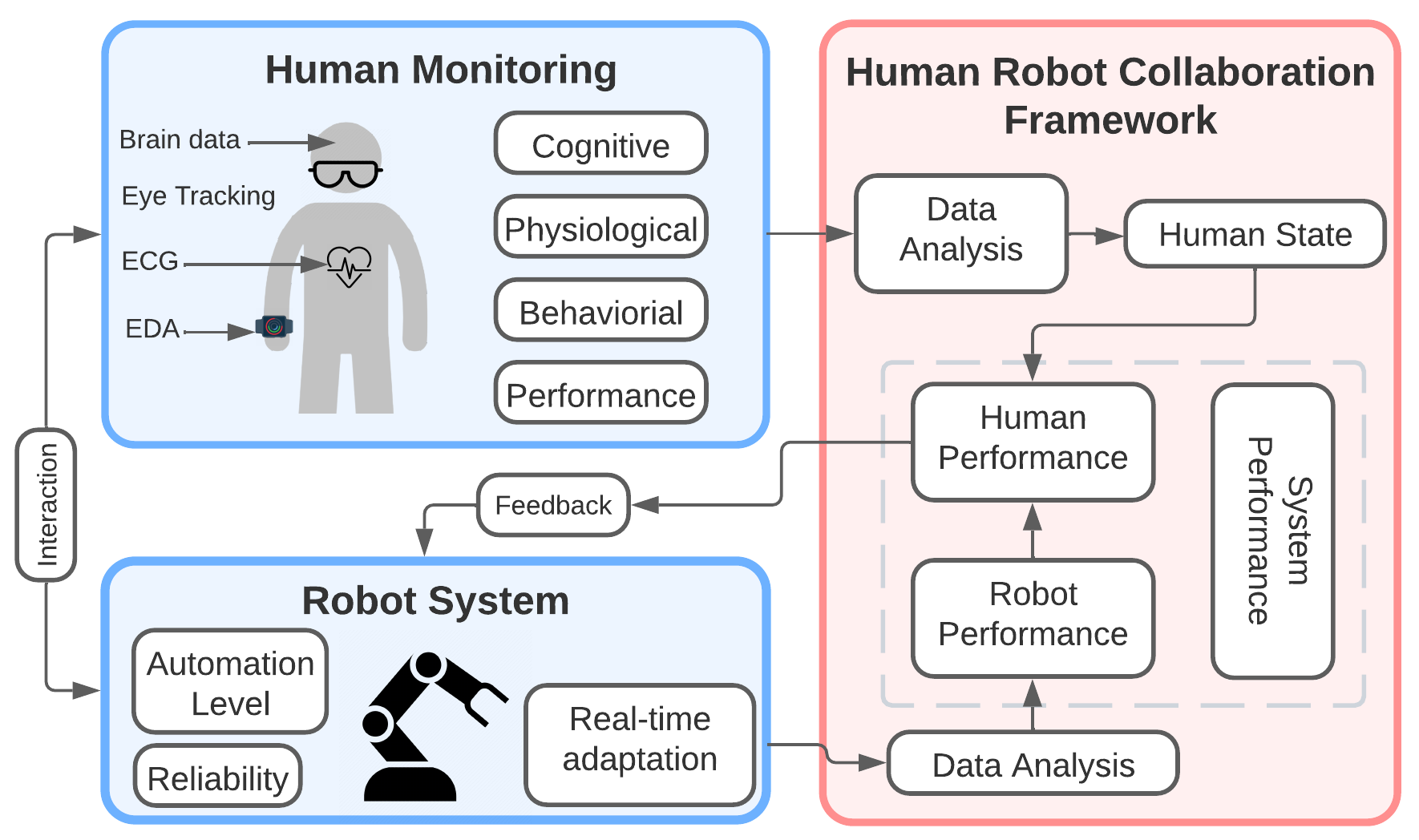
Robot Adaptation Under Operator Cognitive Fatigue Using Reinforcement Learning
Jay K. Shah, Aakash Yadav, Sarah K. Hopko, Prabhakar R. Pagilla, Ranjana K. Mehta
IEEE RO-MAN 2023
video
bib
|

|
Brain-Behavior Relationships of Trust in Shared Space Human-Robot Collaboration
Sarah Hopko, Yinsu Zhang, Aakash Yadav, Prabhakar Pagilla, Ranjana Mehta
ACM THRI
pdf
video
bib
|
|
Interplay of Cognitive Fatigue and Trust in Human-Robot Collaboration
Aakash Yadav, Sarah Hopko, Ranjana Mehta
HFES 66th Annual Meeting
pdf
slides
bib
|
|
Capturing Dynamic Trust Metrics during Shared Space Human Robot Collaboration: An eye-tracking approach
Yinsu Zhang, Sarah Hopko, Aakash Yadav, Ranjana Mehta
HFES 66th Annual Meeting
pdf
bib
|
|
Multimodal Bio-Behavioral Approaches to Study Trust in Human-Robot Collaboration
Aakash Yadav, Sarah Hopko, Yinsu Zhang, Ranjana Mehta
IEEE HRI 2022 Test Methods & Metrics Workshop
pdf
slides
bib
|
|
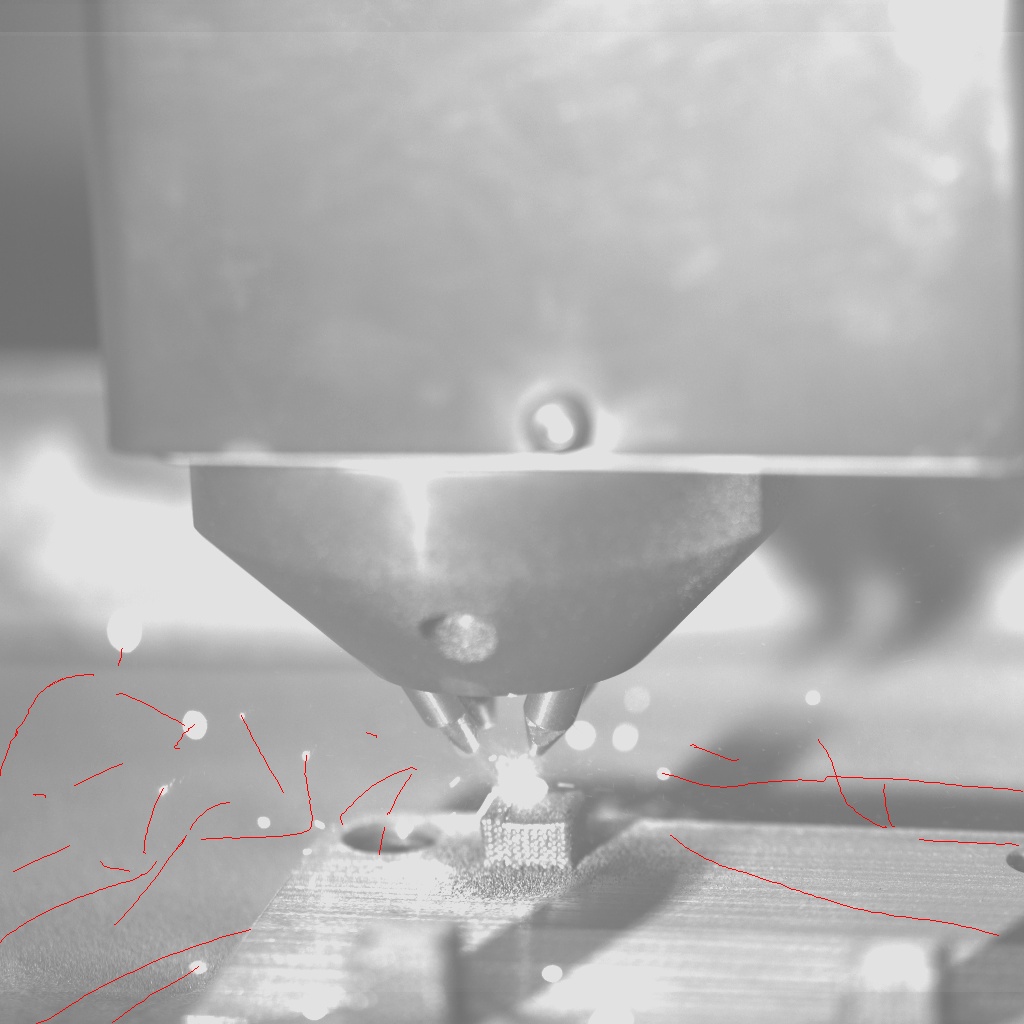
Tracking and Quantifying Spatter Characteristics in a Laser Directed Energy Deposition Process Using Kalman Filter
Ashif Iquebal, Aakash Yadav, Rama Krishna Gorthi, Satish TS Bukkapatnam
NAMRC 2022
pdf
bib
|
|
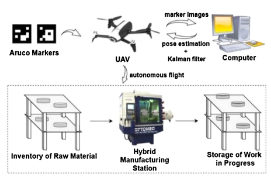
Image-based flight control of unmanned aerial vehicles (UAVs) for material handling in custom manufacturing
Yuhao Zhong, Zimo Wang, Aditya V. Yalamanchili, Aakash Yadav, B.N. Ravi Srivatsa, Srikanth Saripalli, Satish T.S.Bukkapatnam
Journal of Manufacturing Systems, 2020
pdf
bib
|
|
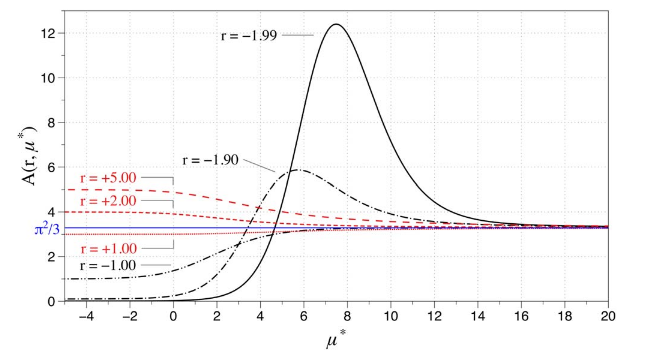
An analytic study of the Wiedemann–Franz law and the thermoelectric figure of merit
Aakash Yadav, PC Deshmukh, Ken Roberts, NM Jisrawi, SR Valluri
Journal of Physics Communications, 2019
pdf
bib
|
Bachelor’s Thesis Project
Design and Fabrication of Experiment for Dynamic Analysis of Mechanisms
In collaboration with Akhil Akunuru
(under guidance of Prof. Sriram Sundar, IIT Tirupati)
[BTP report]
Other Implementations and Projects
This project list is not exhaustive and is not maintained. Please contact me for more details. Its provided here for reference and record keeping.
|
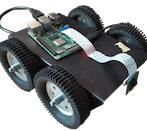
Subo: ROS based robot using monocular SLAM
- The four-wheeled robot runs ROS nodes on the onboard RPi and communicates with the ground station computer
- Base computer subscribes to images which are processed to find required odometery using fiducial markers
- Implemented ORB-SLAM2 on the monocular image stream for mapping and navigation in the indoor environment
code
|
|
Design and fabrication of experimental setup for kinematic and dynamic analysis
- Designed the experimental setup to have three retrofitted mechanism configurations for institute’s lab
- Performed detailed dynamic and kinematic analysis of the setup using Simscape, Python and GeoGebra
- Carried out complete instrumentation (with integrated display) of the setup to take measurements of various parameters
pdf
code
|

|
Analysis of GAN and its variants
- Implemented GAN, WGAN using PyTorch for the MNIST dataset.
- Created custom face dataset and used DCGAN to generate fake samples.
pdf
code
|
|
Autonomous Drone Navigation using Fiducial Markers
- Used ArUco markers for pose estimation and localization in real-time in an indoor environment
- Captured images are sent to base PC where computation happens, and the odometry is sent back to drone using ROS
pdf
code
|
|
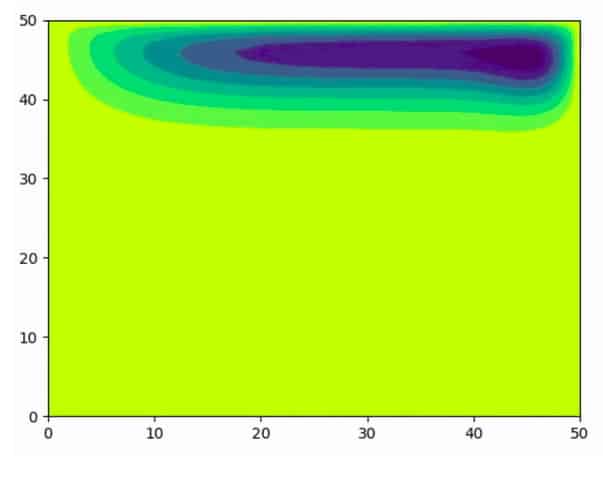
CFD Analysis Lid Driven Cavity Problem
- Solved and simulated the problem in derived variable form using iterative method for both static and transient regimes
- Applied Courant-Friedrichs-Lewy Criteria for stability analysis, and both uniform and non-uniform grids for improved results
pdf
code
|
|
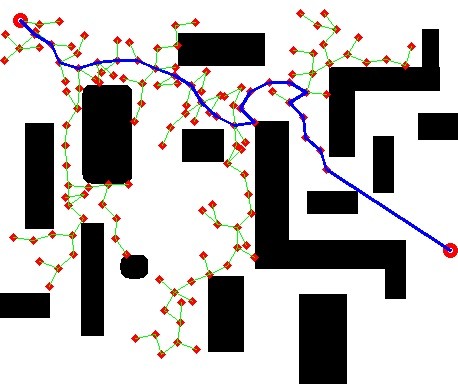
Maze Solver using Rapidly Exploring Random Tree (RRT)
- Implemented the RRT algorithm to solve the maze in a image give the start and end point coordinates
- The growing tree can be visualized as it progresses
code
|
|
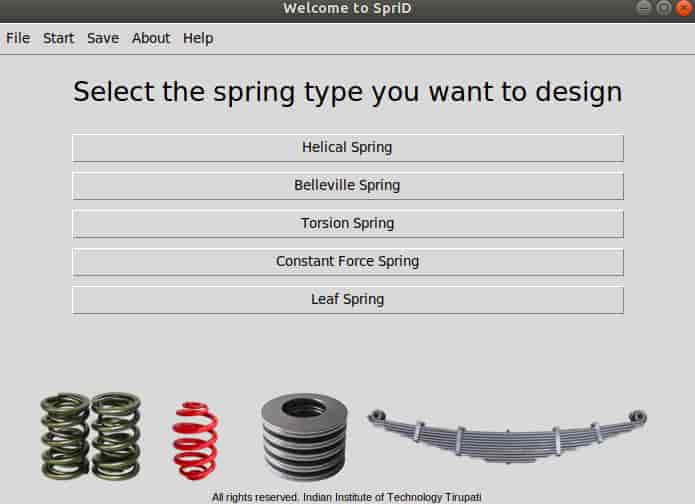
Helical Spring Designer
- Designed and implemented an algorithm to compute parameters like wire and spring diameter, the figure of merit etc.
- Incorporated both static and dynamic conditions and provided a feature to choose from various possible designs.
- Designed full-fledged standalone application in Python using tkinter with user-friendly interface.
code
|

|
Persistence of Vision Display
- Fabricated a mechatronics display based on the persistence of vision of human eye
- Implemented Bluetooth communication to change the display using mobile app
- Minimised the mechanical vibrations produced at high rotations
code
|